Engineered rewards (speedslide, neoslide)
Experiment Overview
This experiment tested whether adding engineered technique rewards (speedslide and neoslide) throughout training improves RL performance. The baseline (A01_as20_long) uses only constant_reward_per_ms and reward_per_m_advanced_along_centerline; the experimental run (A01_as20_long_engineer_rewards) adds small bonuses for speedslide and neoslide.
Hypothesis: Bonuses for driving techniques (speedslide: optimal sideways friction for speed; neoslide: lateral slip) might encourage faster, more efficient driving and improve best race times.
Results
Important: Run durations differed: A01_as20_long ~495 min, A01_as20_long_engineer_rewards ~242 min. All findings below are by relative time (minutes from run start). Common window: up to 242 min.
Key Findings:
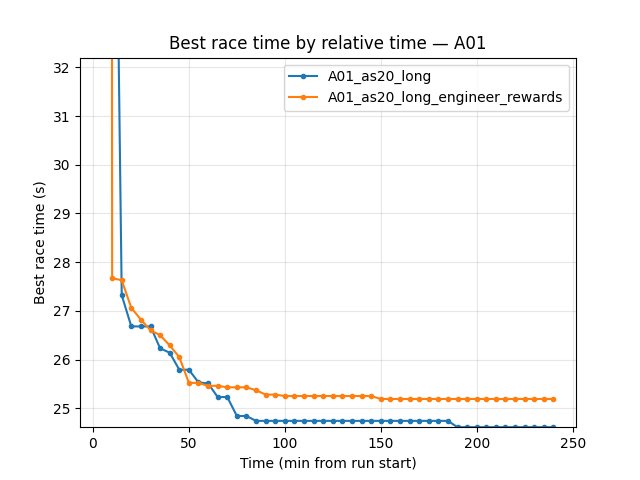
Best A01 time: baseline is better. At 240 min: A01_as20_long 24.53s, engineer_rewards 24.94s (~410 ms slower). engineer_rewards plateaus at 24.94s and never matches the baseline.
Eval finish rate: engineer_rewards 68% vs baseline 63% at 240 min — slightly higher with engineered rewards.
First eval finish: baseline 8.3 min, engineer_rewards 19.4 min — baseline reaches first finish much earlier.
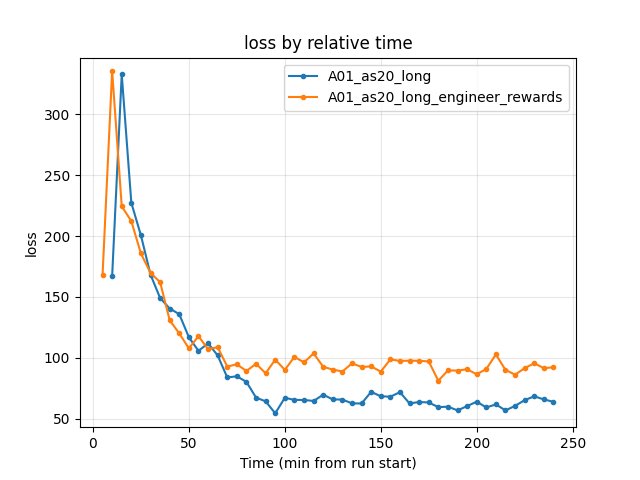
Training loss at 240 min: baseline 63.89, engineer_rewards 92.26 — higher loss with engineered rewards.
Conclusion: Adding speedslide (0.01) and neoslide (0.01) rewards did not improve best time; it made it worse (~410 ms) and delayed convergence. The extra reward signal may encourage suboptimal behavior or change the optimization landscape unfavorably.
Run Analysis
A01_as20_long (baseline): No pretrain, no engineered rewards.
engineered_speedslide_reward_schedule: [[0, 0]],engineered_neoslide_reward_schedule: [[0, 0]]. ~495 min, 3 TensorBoard log dirs merged.A01_as20_long_engineer_rewards: Same config as baseline except
engineered_speedslide_reward_schedule: [[0, 0.01]],engineered_neoslide_reward_schedule: [[0, 0.01]]. ~242 min, 2 log dirs merged.
Detailed TensorBoard Metrics Analysis
Methodology — Relative time and by steps: Metrics are compared at checkpoints 5, 10, 15, 20, … min (only up to the shortest run) and at step checkpoints 50k, 100k, … The figures below show one metric per graph (runs as lines, by relative time).
A01 Map Performance (common window up to 242 min)
A01_as20_long (baseline): First eval finish ~8.3 min. At 60 min — 24.77s; at 120 min — 24.59s; at 180 min — 24.59s; at 240 min — 24.53s.
A01_as20_long_engineer_rewards: First eval finish ~19.4 min. At 60 min — 24.94s; at 120 min — 24.94s; at 180 min — 24.94s; at 240 min — 24.94s (plateau).
Training Loss
Baseline: at 240 min — 63.89.
Engineer rewards: at 240 min — 92.26 (higher).
Configuration Changes
Rewards (rewards section in config YAML):
# Baseline: all engineered rewards disabled
engineered_speedslide_reward_schedule: [[0, 0]]
engineered_neoslide_reward_schedule: [[0, 0]]
# Engineer_rewards run: small bonuses throughout training
engineered_speedslide_reward_schedule: [[0, 0.01]]
engineered_neoslide_reward_schedule: [[0, 0.01]]
Hardware
GPU: Same as other A01 runs.
System: Windows.
Conclusions
Adding speedslide (0.01) and neoslide (0.01) rewards did not help best A01 time. The engineer_rewards run plateaued at 24.94s vs baseline 24.53s (~410 ms worse).
Eval finish rate was slightly higher (68% vs 63%), but first eval finish was much later (19.4 min vs 8.3 min).
The extra reward signal may have encouraged over-sliding or changed the optimization landscape; loss was higher. For best time on A01, keep engineered rewards disabled or try lower values / different schedules.
Recommendations
For best A01 time: Use baseline reward structure (no speedslide/neoslide bonuses). Current values (0.01 each) did not help.
Future experiments: Try lower values (e.g. 0.001), or schedule rewards to kick in only after basic driving is learned (e.g. [[2000000, 0.01]]); or try close_to_vcp / kamikaze with small values.
Analysis Tools:
By relative time and by steps:
python scripts/analyze_experiment_by_relative_time.py A01_as20_long A01_as20_long_engineer_rewards --interval 5 --step_interval 50000Plots:
python scripts/generate_experiment_plots.py --experiments reward_shaping
BC full IQN resume with engineered rewards (A01_as20_long_full_iqn_bc_3_resume_engineer_rewards)
Experiment Overview
This run tests engineered rewards (speedslide and neoslide) on top of a BC full IQN–pretrained agent. It was initialized from the checkpoint in save/A01_as20_long_full_iqn_bc_3 (weights and optimizer state from that run). Unlike the earlier engineer_rewards experiment (no pretrain), the policy thus starts from an already RL-trained BC full IQN; then training continues with higher engineered reward coefficients (0.1 each). v2 and v3 use lower coefficients (0.01/0.01 and 0.05/0.01).
Goal: See whether engineered rewards help or hurt when the agent already has good driving priors from BC.
Results
Important: All findings are by relative time. Common window for the three runs: up to 215 min (baseline ~231 min, v2 ~222 min, v3 ~217 min).
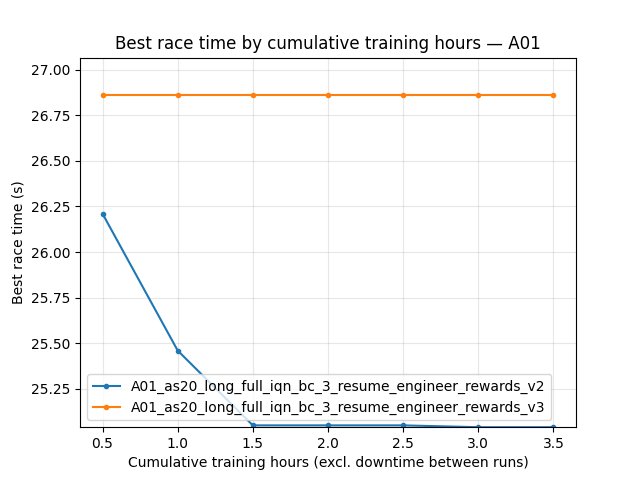
Baseline (resume_engineer_rewards, 0.1/0.1): No eval finishes over the full run. Eval race time stays at 300s (timeout), 0% finish rate;
alltime_min_ms_A01remains 300s. Explo also shows 300s until ~300k steps. Conclusion: High (0.1/0.1) engineered rewards broke the resumed policy — the agent stopped finishing eval (and initially explo) races.v2 (0.01/0.01) and v3 (0.05/0.01): Both keep 24.52s best (inherited from checkpoint). v2 improves robust mean (25.60s at 215 min) and explo best (25.04s); v3 gives higher eval finish rate (86%) and better mean eval time (71.11s at 210 min) but worse robust mean (32.29s) and no explo best improvement (26.86s). See the “v2 vs v3” subsection below for full comparison.
Run Analysis
A01_as20_long_full_iqn_bc_3_resume_engineer_rewards: Initialized from
save/A01_as20_long_full_iqn_bc_3. Speedslide 0.1, neoslide 0.1. Map A01, refA01_0.5m_cl.npy. ~231 min. No eval finishes (0% rate, 300s throughout). Config:save/A01_as20_long_full_iqn_bc_3_resume_engineer_rewards/config_snapshot.yaml.A01_as20_long_full_iqn_bc_3_resume_engineer_rewards_v2: Speedslide 0.01, neoslide 0.01. ~222 min. Best 24.52s; eval rate 77% at 210 min; explo best 25.04s.
A01_as20_long_full_iqn_bc_3_resume_engineer_rewards_v3: Speedslide 0.05, neoslide 0.01. ~217 min. Best 24.52s; eval rate 86% at 210 min; explo best 26.86s (no improvement).
Baseline for comparison:
A01_as20_long_full_iqn_bc_3(checkpoint source; no or zero engineered rewards). Compare by relative time when needed.
Three-way analysis (and plots): python scripts/analyze_experiment_by_relative_time.py A01_as20_long_full_iqn_bc_3_resume_engineer_rewards A01_as20_long_full_iqn_bc_3_resume_engineer_rewards_v2 A01_as20_long_full_iqn_bc_3_resume_engineer_rewards_v3 --interval 10 --step_interval 100000 --plot --output-dir docs/source/_static --prefix exp_reward_shaping_bc_resume_triple. Generated JPGs: exp_reward_shaping_bc_resume_triple_*.jpg (A01 best, loss, avg_q, etc.).
Configuration Changes
Rewards (from run config snapshot):
engineered_speedslide_reward_schedule: [[0, 0.1]]
engineered_neoslide_reward_schedule: [[0, 0.1]]
engineered_kamikaze_reward_schedule: [[0, 0.0]]
engineered_close_to_vcp_reward_schedule: [[0, 0.0]]
Training: run_name: "A01_as20_long_full_iqn_bc_3_resume_engineer_rewards", batch_size: 512, pretrain_bc_heads_path: null (resume from existing checkpoint). LR and gamma schedules as in the main config (e.g. lr 0.001 to 0.00005 to 0.00001 by steps).
Conclusions and Recommendations
High (0.1/0.1) engineered rewards on BC resume broke the policy: no eval finishes, 300s timeout throughout. Use low coefficients (v2: 0.01/0.01 or v3: 0.05/0.01) when resuming with engineered rewards.
Compare by relative time and by steps to
A01_as20_long_full_iqn_bc_3when needed. For the three resume runs (baseline, v2, v3):python scripts/analyze_experiment_by_relative_time.py A01_as20_long_full_iqn_bc_3_resume_engineer_rewards A01_as20_long_full_iqn_bc_3_resume_engineer_rewards_v2 A01_as20_long_full_iqn_bc_3_resume_engineer_rewards_v3 --interval 10 --step_interval 100000(add--logdir <path>if TensorBoard logs are not intensorboard/).
BC full IQN resume: v2 vs v3 (engineered reward coefficients)
Experiment Overview
Two runs resumed from the same BC full IQN checkpoint (from save/A01_as20_long_full_iqn_bc_3), differing only in engineered reward coefficients:
v2:
engineered_speedslide_reward_schedule: [[0, 0.01]],engineered_neoslide_reward_schedule: [[0, 0.01]](equal, low).v3:
engineered_speedslide_reward_schedule: [[0, 0.05]],engineered_neoslide_reward_schedule: [[0, 0.01]](5x higher speedslide, same neoslide).
Both use map_cycle with A01, exploration repeat 4 and eval repeat 4. Goal: Compare how different speedslide/neoslide strengths affect stability of best time, eval finish rate, and exploration best.
Results
Important: All findings below are by relative time (minutes from run start). v2 ~222 min, v3 ~217 min; common window up to 215 min.
Key Findings:
Best A01 time: Both runs keep 24.52s (inherited from checkpoint); no improvement over the window.
eval_race_time_robust_trained_A01 (near-best finishes): v2 improves over time (mean 29.59s at 5 min → 25.59s at 215 min). v3 degrades (mean 30.12s at 5 min → 32.32s at 215 min). Lower engineered rewards (v2) preserve stable near-best performance; higher speedslide (v3) worsens it.
eval_race_time_trained_A01 (all eval finishes): v3 has higher finish rate (86% vs 77% at 215 min) and lower mean time (71.19s vs 88.84s at 215 min). So v3 finishes more often with better average among finishes, but v2 keeps better “robust” (close-to-best) behavior.
explo_race_time_trained_A01: v2 exploration best improves (25.05s by 70 min and later). v3 exploration best stays at 26.86s (no improvement). v2 explores toward faster times; v3 does not.
Conclusion: v2 (0.01/0.01) is better for stability and best-time potential (robust mean, explo best). v3 (0.05/0.01) gives higher eval finish rate and better mean eval time but worse robust mean and no exploration improvement. Trade-off: use v2 for pushing best time; v3 if finish rate / mean time matter more.
Run Analysis
A01_as20_long_full_iqn_bc_3_resume_engineer_rewards_v2: Speedslide 0.01, neoslide 0.01. Map A01, ref
A01_0.5m_cl.npy; exploration repeat 4, eval repeat 4. ~222 min. Config:save/A01_as20_long_full_iqn_bc_3_resume_engineer_rewards_v2/config_snapshot.yaml.A01_as20_long_full_iqn_bc_3_resume_engineer_rewards_v3: Speedslide 0.05, neoslide 0.01. Same map and repeat setup. ~217 min. Config:
save/A01_as20_long_full_iqn_bc_3_resume_engineer_rewards_v3/config_snapshot.yaml.
Detailed TensorBoard Metrics Analysis
Methodology — Relative time and by steps: Metrics are compared at checkpoints 5, 10, 15, … min (up to the shortest run) and at step checkpoints (e.g. 50k, 100k). The figures below show one metric per graph (runs as lines, by relative time). Command: python scripts/analyze_experiment_by_relative_time.py A01_as20_long_full_iqn_bc_3_resume_engineer_rewards_v2 A01_as20_long_full_iqn_bc_3_resume_engineer_rewards_v3 --interval 5 --step_interval 50000 --plot --output-dir docs/source/_static --prefix exp_reward_shaping_bc_resume_v2_v3.
A01 eval robust (near-best) and eval finish rate (common window up to 215 min)
v2: At 60 min — robust mean 26.06s, eval finish rate 67%. At 215 min — robust mean 25.59s, eval finish rate 77%.
v3: At 60 min — robust mean 29.63s, eval finish rate 76%. At 215 min — robust mean 32.32s, eval finish rate 86%.
A01 exploration best
v2: Best improves from 28.24s (10 min) to 25.04s (70 min and later).
v3: Best stays at 26.86s from 10 min onward (no improvement).
Configuration Changes
Rewards (only difference between v2 and v3):
# v2: low, equal
engineered_speedslide_reward_schedule: [[0, 0.01]]
engineered_neoslide_reward_schedule: [[0, 0.01]]
# v3: 5x speedslide, same neoslide
engineered_speedslide_reward_schedule: [[0, 0.05]]
engineered_neoslide_reward_schedule: [[0, 0.01]]
Map cycle (both): A01, exploration repeat 4, eval repeat 4; reference line A01_0.5m_cl.npy.
Hardware
Same as other BC-resume runs (4 GPU collectors, running_speed 512).
Conclusions
v2 (0.01/0.01) keeps robust mean improving (25.59s at 215 min) and exploration best improving (25.04s). Better for best-time focus and stability.
v3 (0.05/0.01) gives higher eval finish rate (86%) and better mean eval time (71.19s) but worse robust mean (32.32s) and no exploration best improvement. Better for finish rate and average performance.
For pushing A01 best time after BC resume, prefer v2-style (low, equal) engineered rewards.
Recommendations
Use 0.01/0.01 (v2) when optimizing for best time and stable near-best behavior.
If you need higher finish rate and better mean time, try v3-style (higher speedslide), accepting worse robust mean and no explo best gain.
Analysis (and plots):
python scripts/analyze_experiment_by_relative_time.py A01_as20_long_full_iqn_bc_3_resume_engineer_rewards_v2 A01_as20_long_full_iqn_bc_3_resume_engineer_rewards_v3 --interval 5 --step_interval 50000 --plot --output-dir docs/source/_static --prefix exp_reward_shaping_bc_resume_v2_v3
Overall conclusions: engineered rewards and 4 explo / 4 eval
Do engineered rewards (speedslide, neoslide) actually help?
Across the experiments on this page, the impact is mixed and generally modest:
Without BC pretrain (A01_as20_long vs A01_as20_long_engineer_rewards): 0.01/0.01 hurt best time (~410 ms worse, 24.94s vs 24.53s), delayed first finish, and increased loss. So on a blank-slate agent, small engineered bonuses did not solve anything and made things worse.
With BC full IQN resume (v2 vs v3): Low coefficients (v2: 0.01/0.01) preserve best time (24.52s), improve robust mean and exploration best. Higher speedslide (v3: 0.05/0.01) gives better finish rate and mean eval time but worse robust mean and no exploration best improvement. So engineered rewards do not “solve” best time; at best they can slightly improve finish rate and average performance at the cost of stability and best-time potential.
Takeaway: Engineered rewards are not a reliable lever for improving best lap time. For best-time focus, keep them zero or very low (0.01/0.01). Use higher values only if you care more about finish rate / mean time than about pushing the best time.
Does the 4 explo / 4 eval map_cycle help?
The 4 exploration + 4 eval setup (repeat 4 for explo, repeat 4 for eval) was used in v2 and v3. It gives a 50/50 ratio of exploration vs eval episodes, instead of the more common 64 explo / 1 eval (≈98% exploration).
Pros: More frequent eval episodes give a steadier signal of greedy performance (finish rate, mean time, robust mean) and more greedy data in the buffer. That can make tuning and interpretation easier and can reduce the risk of drifting away from good greedy behavior when exploration dominates.
Cons: Fewer exploration steps per “cycle” (4 vs 64), so discovery of new good trajectories may be slower; total exploration per unit time is lower.
In practice (v2/v3): Both runs kept 24.52s best, v2 improved robust mean and exploration best, v3 improved finish rate. So the 4/4 balance did not prevent good behavior and likely made the trade-off between v2 and v3 easier to read from metrics.
Takeaway: The 4/4 approach is a reasonable choice when you want a balanced view of explo vs eval and more stable metrics. For maximum exploration throughput you can still use 64/1; for tuning and clearer assessment, 4/4 (or similar balanced ratios) is justified.