BC pretraining
Experiment Overview
This experiment tested whether adding behavioral cloning (BC) pretraining on top of the visual backbone pretraining improves RL training. Two BC-based RL variants are compared:
A01_as20_long_vis_bc_pretrained — three stages: (1) Visual pretrain (vis v1), (2) BC pretrain with backbone only (single-frame action prediction, encoder saved), (3) RL with that encoder.
A01_as20_long_vis_bc_ah_pretrained — uses both the visual encoder (img head) and the action head (A_head) from the v2_multi_offset_ahead_dropout_inner BC experiment (see BC pretrain: training length & early stop (Level 1)). That BC run uses multi-offset action prediction, IQN-style A_head (MLP) with dropout (0.2 on features, 0.1 inside head), vis v2 backbone, and achieves best val_acc 0.597 / val_loss 1.971. RL injects
encoder.ptandactions_head.ptfromoutput/ptretrain/bc/v2_multi_offset_ahead_dropout_inner/.
Stages for the first variant:
Visual pretrain — same as A01_as20_long_vis_pretrained: autoencoder on replay frames (
config_files/pretrain/vis/pretrain_config.yaml), producingoutput/ptretrain/vis/v1/encoder.pt.BC pretrain — train a CNN to predict actions from images, initialized from the vis encoder (
config_files/pretrain/bc/pretrain_config_bc.yaml). BC modebackbone: only the encoder is saved (output/ptretrain/bc/v1.1/encoder.pt) and injected into IQN. In this experiment BC was simply action prediction from a single frame (no temporal context).RL training — same RL config as the other runs, with
pretrain_encoder_path: "output/ptretrain/bc/v1.1/encoder.pt"so the BC-trained encoder is used as the IQN visual backbone.
Hypothesis: BC might provide a better initialization than visual-only pretraining by aligning the backbone with action-relevant features. Using both encoder and A_head (bc_ah) may give a stronger policy prior than encoder-only.
Main question: Does BC help over vis-only? Does adding the pretrained A_head (bc_ah) improve over encoder-only BC (bc_pretrained)?
Results
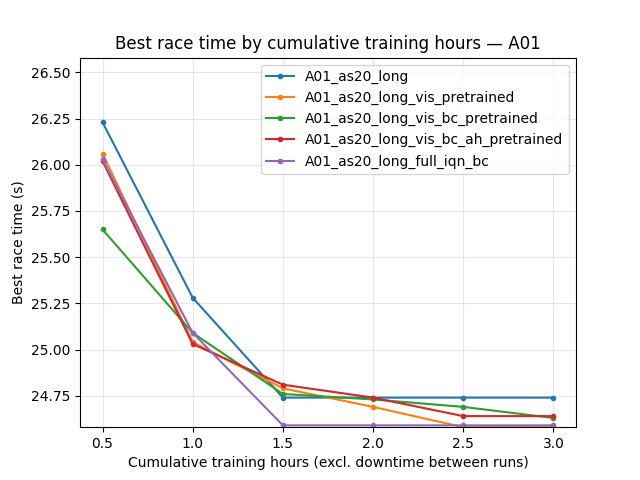
Important (time axis): Numeric minute checkpoints in the sections below are TensorBoard wall-clock minutes on merged logs (5-minute grid, --time-axis wall_minutes), as in the original write-up. Cumulative training hours for the main quartet (audited): baseline ~8.2 h, vis_pretrained ~4.6 h, bc_pretrained ~4.4 h, bc_ah ~4.1 h — wall span and training time are close (ratio ~1), so the old minute tables are still roughly comparable to training progress. Exceptions: full_iqn_bc and full_iqn_bc_2 have wall ≫ training (see Time axis conventions (experiment write-ups)); narrative that uses “~1020 min” or “~770 min” there is calendar TB time, not hours the learner trained. Use BY STEP or cumul_training_hours for those. Comparing by “last value” across different run lengths is invalid. Common wall window for the first four runs: up to ~244 min (shortest = bc_ah).
Key Findings:
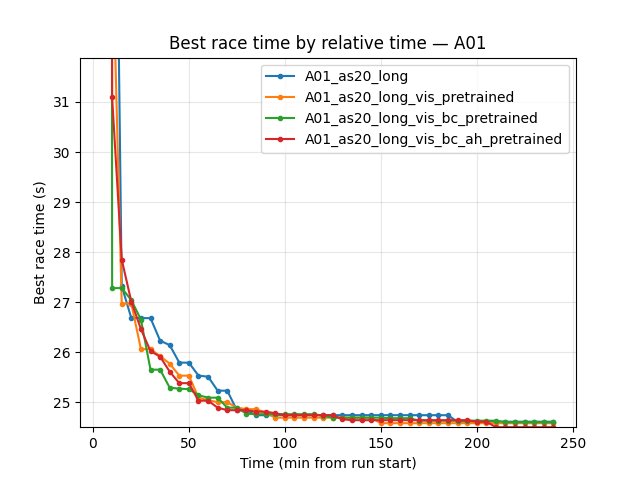
BC does not improve final performance over vis-only (encoder-only BC). By the end of the common window (260 min for the first three runs), vis_pretrained has the best A01 time (24.47s), then bc_pretrained (24.49s), then baseline (24.53s).
BC + A_head (bc_ah) matches the best A01 time. At 240 min (end of bc_ah run), bc_ah reaches 24.47s — tied with vis_pretrained and better than bc_pretrained (24.49s) and baseline (24.53s). So the new experiment (encoder + A_head from v2_multi_offset_ahead_dropout_inner) is as good as vis-only on final best time and better than encoder-only BC.
BC gives the fastest early convergence (encoder-only): First eval finish at 5.1 min (bc) vs 8.3 min (baseline) vs 11.2 min (vis_pretrained). bc_ah has first eval finish at 15.2 min (slowest of the four) — pretrained A_head does not help early first finish.
By steps: At 10.85M steps (common max for first three), same ordering: vis_pretrained 24.47s, bc 24.49s, baseline 24.53s. bc_ah run is shorter; at equal relative time (244 min) bc_ah reaches 24.47s.
Eval finish rate at 240 min: vis_pretrained 74%, bc_pretrained 70%, bc_ah 68%, baseline 63%. bc_ah is between bc and baseline.
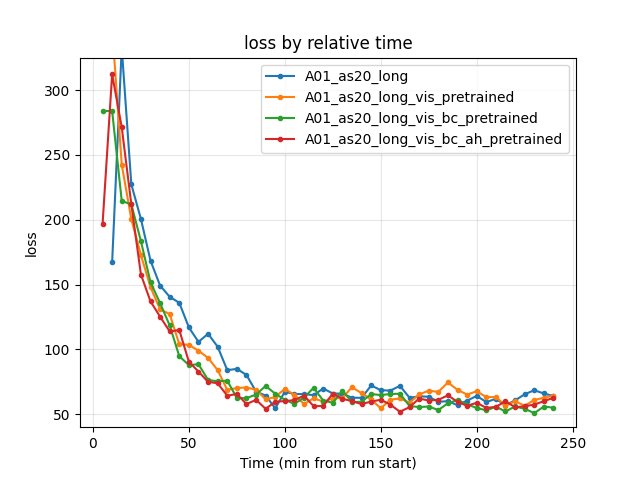
Training loss at 240 min: bc_pretrained 54.93 (lowest), bc_ah 62.58, baseline 63.89, vis_pretrained 64.33. bc_ah has lower loss than baseline and vis.
Conclusion: BC + A_head (bc_ah) is the only BC variant that matches vis-only on final A01 best time (24.47s) and beats encoder-only BC (24.49s). It does not improve over vis on finish rate or early first finish; it is a viable alternative when using the multi-offset A_head pretrain.
Does pretrain and transfer help? (Summary)
Question: With the setups tried so far, does pretrain (BC encoder + A_head) and transfer actually help, or is it not working?
Answer: Yes, pretrain helps when used correctly. Evidence: bc_ah (encoder + A_head trainable) reaches 24.47s — tied with vis-only. enc_ah_freeze (both frozen) fails (24.97s, 22% finish rate). enc_ah_freeze_resume (unfreeze + lower lr/epsilon) recovers to 24.51s from the poor enc_ah_freeze checkpoint. So pretrain works when allowed to fine-tune; freezing A_head hurts; unfreezing with gentle lr/epsilon recovers. It does not beat vis-only on final time, but is a viable path. For best final time, use bc_ah or vis-only; avoid freezing A_head.
Run Analysis
A01_as20_long (baseline): No pretrain. Cumulative training ~8.18 h; TB wall span ~486 min; 3 dirs merged (ratio ~1).
A01_as20_long_vis_pretrained: ~4.59 h training; wall ~270 min; 2 dirs.
A01_as20_long_vis_bc_pretrained: ~4.42 h training; wall ~260 min; 2 dirs.
A01_as20_long_vis_bc_ah_pretrained (bc_ah): ~4.09 h training; wall ~240 min; 2 dirs. Pretrain paths as before (v2_multi_offset_ahead_dropout_inner BC).
A01_as20_long_vis_bc_ah_pretrained_enc_freeze: ~2.67 h training; wall ~155 min; 2 dirs.
A01_as20_long_vis_bc_ah_pretrained_enc_ah_freeze: ~3.84 h training; wall ~225 min; 2 dirs.
A01_as20_long_vis_bc_ah_pretrained_enc_ah_freeze_resume: ~4.34 h training; wall ~255 min; 2 dirs.
A01_as20_long_full_iqn_bc: ~3.25 h cumulative training; TB wall span ~1310 min (wall ≫ training, ratio ~6.7×). The old “~192 min” line matched training time (~195 min), not the TB wall span. 3 TB dirs. See “Experiment: Full IQN from BC (full_iqn_bc)”.
A01_as20_long_full_iqn_bc_2: ~4.09 h training; wall ~1018 min (~4.2×). 2 dirs. Earlier text used “~1020 min” as if it were training length — wrong.
A01_as20_long_full_iqn_bc_3: ~19.45 h training; wall ~1162 min (ratio ~1.0; ~1166 min wall ≈ 19.4 h so magnitude similar to training). 5 dirs.
A01_as20_long_full_iqn_bc_3_best_ref: Full IQN from BC (v3_multi_offset) with reference line from the best human-driven run (
A01_0.5m_cl_best.npy) inmap_cycle. ~265 min, 2 TensorBoard log dirs merged. See “Experiment: Full IQN from BC with human best reference line (best_ref)”.A01_as20_long_full_iqn_bc_3_4explo: Same full IQN from BC (v3_multi_offset) with exploration repeat 4 instead of 64 in
map_cycle(fewer exploration episodes per cycle). ~337 min, 2 TensorBoard log dirs merged. See “Experiment: Full IQN from BC with 4 exploration episodes (4explo)”.
Detailed TensorBoard Metrics Analysis
Methodology — Wall-minute tables vs training hours: Main quartet + freeze sections use the historical 5, 10, … wall-minute grid (--time-axis wall_minutes --interval 5). For full_iqn_bc / _2 / _3, reinterpret long “minute” narratives as TB wall time or switch to BY STEP / cumul_training_hours. Figures from generate_experiment_plots.py use default auto (training hours on X when logged). Step checkpoints: 50k, 100k, … as before.
A01 Map Performance (common window up to 244 min for all four runs)
Baseline (A01_as20_long): at 35 min — 25.02s; at 85 min — 24.71s; at 150 min — 24.59s; at 240 min — 24.53s. First eval finish ~8.3 min.
Vis pretrained (A01_as20_long_vis_pretrained): at 35 min — 24.79s; at 85 min — 24.55s; at 150 min — 24.50s; at 240 min — 24.47s. First eval finish ~11.2 min.
BC pretrained (A01_as20_long_vis_bc_pretrained): at 10 min — 24.92s (fastest early); at 35 min — 24.89s; at 85 min — 24.59s; at 150 min — 24.55s; at 240 min — 24.49s. First eval finish ~5.1 min (earliest).
BC + A_head (A01_as20_long_vis_bc_ah_pretrained): First eval finish ~15.2 min (latest of the four). At 30 min — 24.83s; at 65 min — 24.59s; at 100 min — 24.55s; at 140 min — 24.53s; at 190 min — 24.47s; at 240 min — 24.47s (tied with vis_pretrained for best). Eval finish rate at 240 min: 68%.
Training Loss
Baseline: at 90 min — 64.29; at 240 min — 63.89.
Vis pretrained: at 90 min — 61.35; at 240 min — 64.33.
BC pretrained: at 90 min — 71.70; at 240 min — 54.93 (lowest at 240 min).
BC + A_head (bc_ah): at 90 min — 54.06; at 240 min — 62.58. Lower than baseline and vis at 240 min.
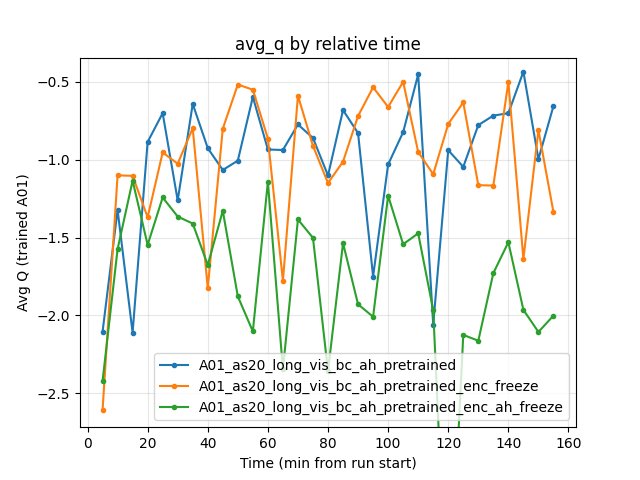
Average Q-values
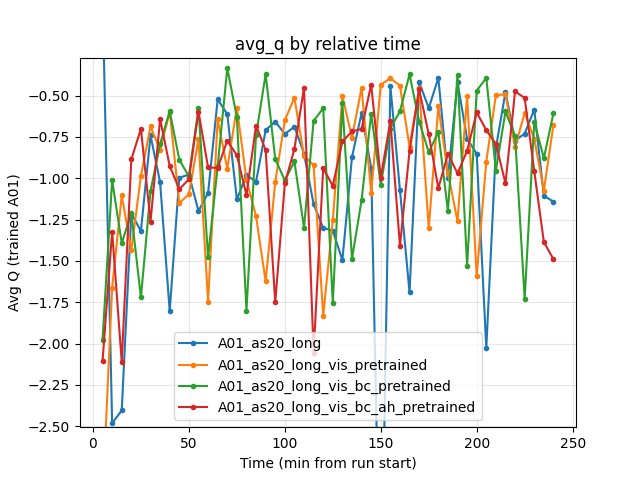
At 240 min: baseline -1.14, vis_pretrained -0.68, bc_pretrained -0.61, bc_ah -1.49. No clear winner; bc_ah is more negative (more conservative Q).
GPU Utilization
All ~69–72% over the common window; no significant difference.
Experiment: Encoder freeze (bc_ah vs enc_freeze)
Goal: Compare A01_as20_long_vis_bc_ah_pretrained (encoder + A_head from v2_multi_offset_ahead_dropout_inner, encoder trainable) with A01_as20_long_vis_bc_ah_pretrained_enc_freeze (same pretrain, img_head frozen during RL). Only difference: nn.vis.freeze: true in enc_freeze (legacy runs used pretrain_encoder_freeze under training, now removed).
Common window: Up to 158 min (shortest run = enc_freeze). All comparisons below are by relative time over this window.
A01 map performance:
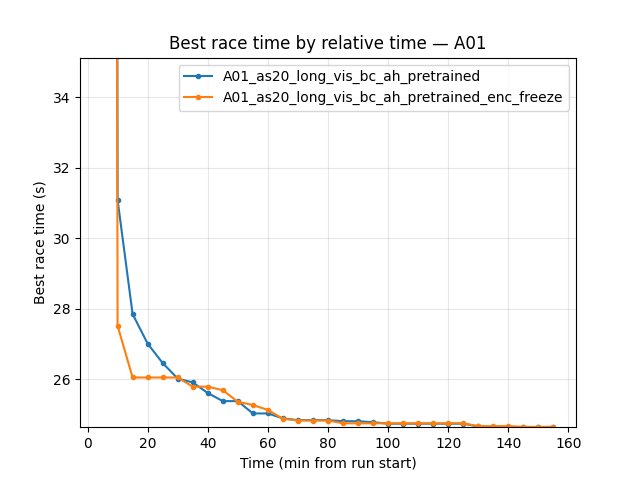
bc_ah (encoder trainable): First eval finish ~15.2 min. At 60 min — 24.80s; at 100 min — 24.55s; at 155 min — 24.50s. Eval finish rate at 155 min — 66%. Run continued to 244 min and reached 24.47s.
enc_freeze (encoder frozen): First eval finish ~4.1 min (much earlier than bc_ah). At 60 min — 24.81s; at 100 min — 24.60s; at 155 min — 24.55s. Eval finish rate at 155 min — 64%. Run ended at ~158 min; best time in window 24.55s.
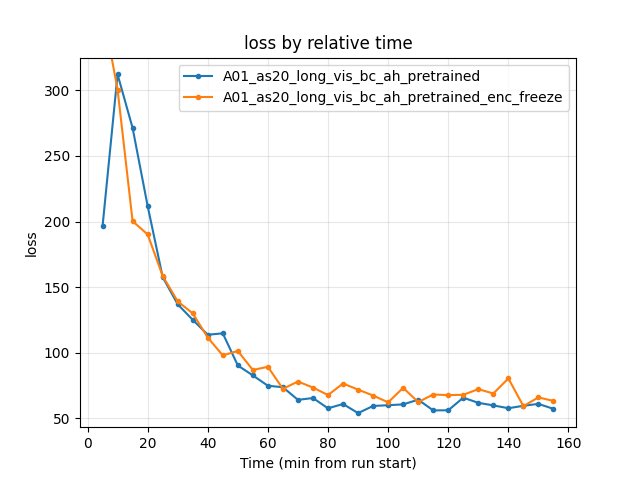
Conclusion (encoder freeze): Over the common window (158 min), bc_ah has slightly better best A01 time (24.50s vs 24.55s at 155 min) and slightly higher eval finish rate (66% vs 64%). enc_freeze has much earlier first eval finish (4.1 min vs 15.2 min). Training loss at 155 min: bc_ah 57.29, enc_freeze 63.33 (bc_ah lower). So freezing the encoder preserves a strong policy prior (very fast first finish) but does not match the trainable-encoder run on best time within 158 min; the trainable encoder (bc_ah) pulls ahead by ~50 ms and has lower loss. For best final A01 time in long runs, keep the encoder trainable; use enc_freeze if you want fastest early first finish or fewer parameters to train.
Training loss and avg Q (at 60, 100, 155 min):
Loss: bc_ah 74.89 / 60.07 / 57.29; enc_freeze 89.35 / 62.26 / 63.33. bc_ah lower at all checkpoints.
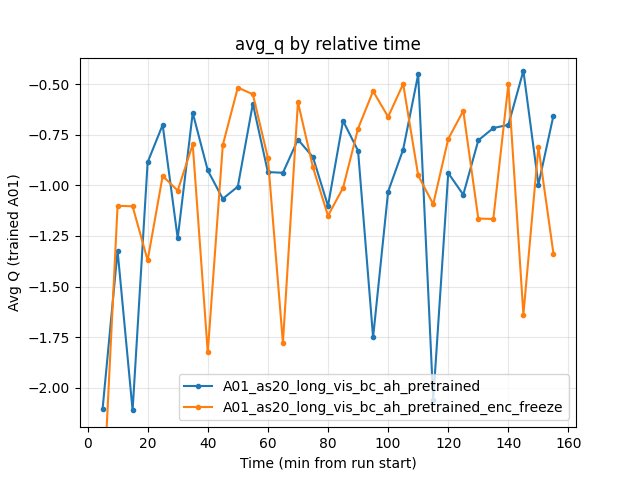
Avg Q: Both fluctuate; at 155 min bc_ah -0.66, enc_freeze -1.34.
Reproduce: python scripts/analyze_experiment_by_relative_time.py A01_as20_long_vis_bc_ah_pretrained A01_as20_long_vis_bc_ah_pretrained_enc_freeze --interval 5 --step_interval 50000
Experiment: Encoder + A_head freeze (three-way: bc_ah vs enc_freeze vs enc_ah_freeze)
Goal: Compare all three freeze variants with the same BC+AH pretrain: (1) bc_ah — both encoder and A_head trainable; (2) enc_freeze — encoder frozen, A_head trainable; (3) enc_ah_freeze — both encoder and A_head frozen (only float_feature_extractor, iqn_fc, V_head trainable). In current configs this maps to nn.vis.freeze and nn.decoder.advantage.freeze (see RL parameter freeze in Configuration Guide).
Common window: Up to 158 min (shortest = enc_freeze). All three runs have data up to 155 min.
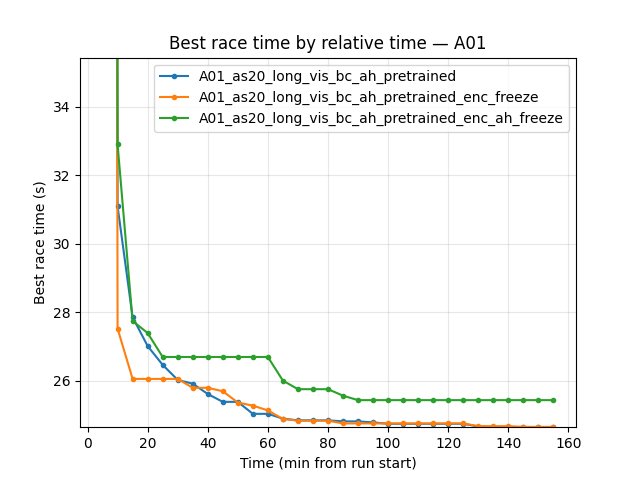
A01 map performance (at 155 min):
Run |
Encoder |
A_head |
Best time (155 min) |
First eval finish |
Eval finish rate (155 min) |
Loss (155 min) |
|---|---|---|---|---|---|---|
bc_ah |
trainable |
trainable |
24.50s |
15.2 min |
66% |
57.29 |
enc_freeze |
frozen |
trainable |
24.55s |
4.1 min |
64% |
63.33 |
enc_ah_freeze |
frozen |
frozen |
24.97s |
8.9 min |
22% |
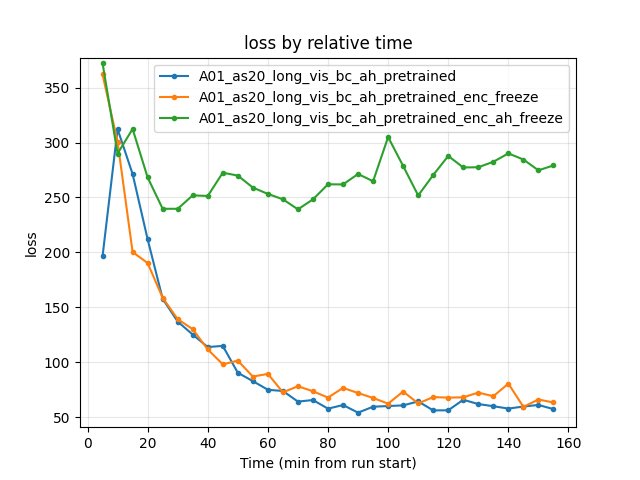
279.12 |
Conclusions (what to freeze):
Freezing both encoder and A_head (enc_ah_freeze) severely hurts RL: best time 24.97s (~470 ms worse than bc_ah), finish rate 22% (vs 66%), loss ~5x higher. The frozen A_head blocks policy adaptation; float_feature_extractor, iqn_fc, and V_head alone cannot compensate. Do not freeze A_head.
Freezing only the encoder (enc_freeze) is acceptable: best time 24.55s (~50 ms worse than bc_ah), finish rate 64%, loss slightly higher. enc_freeze has much earlier first eval finish (4.1 min vs 15.2 min). Use when you want fastest early first finish or fewer trainable parameters.
Best final A01 time: Keep both encoder and A_head trainable (bc_ah). For long runs aiming at 24.47s, do not freeze either.
Summary: Freeze encoder only if you prioritize early first finish; never freeze A_head. For best final time, train both.
Reproduce: python scripts/analyze_experiment_by_relative_time.py A01_as20_long_vis_bc_ah_pretrained A01_as20_long_vis_bc_ah_pretrained_enc_freeze A01_as20_long_vis_bc_ah_pretrained_enc_ah_freeze --interval 5 --step_interval 50000
Experiment: Resume from enc_ah_freeze (unfreeze + lower lr and epsilon)
Goal: Take enc_ah_freeze checkpoint (both encoder and A_head frozen during RL; best 24.97s, 22% finish rate), resume training with everything unfrozen and reduced lr/epsilon. Hypothesis: gentle fine-tuning of the pretrained parts will recover or improve performance.
Setup: Load weights from enc_ah_freeze; set nn.vis.freeze: false, nn.decoder.advantage.freeze: false; lr_schedule: 5e-5 (0–500k), 1e-4 (500k–3M), 5e-5 (3M+); epsilon: 0.1 at start (vs 1.0 in enc_ah_freeze), 0.5 at 300k, 0.03 by 3M.
Common window: Up to 228 min (shortest = enc_ah_freeze). enc_ah_freeze_resume ran ~259 min.
A01 map performance (by relative time):
Run |
Best time (225 min) |
First eval finish |
Eval finish rate (225 min) |
Loss (225 min) |
|---|---|---|---|---|
enc_ah_freeze |
24.97s |
8.9 min |
29% |
229.71 |
enc_ah_freeze_resume |
24.51s |
6.0 min |
56% |
73.39 |
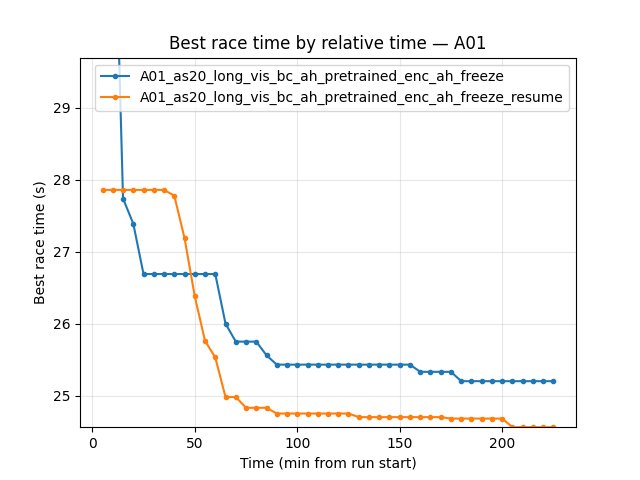
By steps (at 9.65M steps, common for both): enc_ah_freeze best 24.97s; enc_ah_freeze_resume best 24.51s (460 ms better).
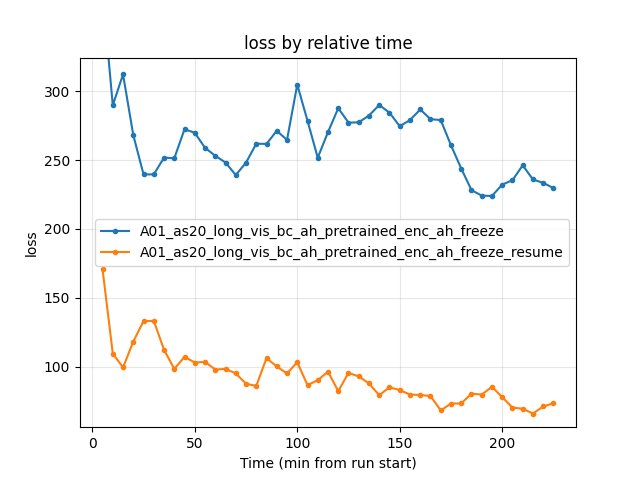
Conclusions:
Unfreezing + lower lr/epsilon recovers from enc_ah_freeze. enc_ah_freeze_resume reaches 24.51s vs 24.97s — ~460 ms improvement. Finish rate 56% vs 22%; loss ~73 vs ~230. The pretrained encoder and A_head, when allowed to fine-tune gently, quickly adapt and improve.
First eval finish: resume 6.0 min vs freeze 8.9 min — slightly earlier.
Recommendation: If you ran enc_ah_freeze and it plateaued poorly, resume with unfreeze + lower lr (5e-5–1e-4) and lower epsilon (0.1 at start) to recover.
Reproduce: python scripts/analyze_experiment_by_relative_time.py A01_as20_long_vis_bc_ah_pretrained_enc_ah_freeze A01_as20_long_vis_bc_ah_pretrained_enc_ah_freeze_resume --interval 5 --step_interval 50000
Experiment: Full IQN from BC (full_iqn_bc)
Goal: Test loading the entire IQN (img_head, float_feature_extractor, iqn_fc, A_head, V_head) from a BC pretrain run that used use_full_iqn: true. The BC run v3_multi_offset (img 100 FPS, 11 offset heads, use_floats) produces iqn_bc.pt; RL loads it via pretrain_bc_heads_path: "output/ptretrain/bc/v3_multi_offset".
Config: Same RL base as other A01_as20_long runs; pretrain_bc_heads_path: "output/ptretrain/bc/v3_multi_offset" (no separate encoder or A_head paths — the full state is in iqn_bc.pt). BC source: config_files/pretrain/bc/pretrain_config_bc_v3_multi_offset.yaml.
Common window: Up to 192 min (full_iqn_bc is the shortest run). All five runs compared: baseline, vis_pretrained, bc_pretrained, bc_ah, full_iqn_bc.
Key findings
A01 best time at 190 min: full_iqn_bc 24.50s (tied with vis_pretrained); bc_ah 24.47s (best); bc_pretrained 24.51s; baseline 24.58s. Full IQN pretrain reaches same final performance as vis_pretrained.
Overfitting: No sign of overfitting. full_iqn_bc improves steadily: 25.84s (20 min) → 24.56s (60 min) → 24.50s (110 min) → 24.50s (190 min). Best time plateaus; run ended at 192 min before further training.
Training loss: full_iqn_bc starts with a very high loss (~15,749 at 5 min) due to distribution shift (BC classification vs RL regression). By 15 min it drops to ~416; by 85 min ~53 (lowest among runs at that checkpoint). Recovers quickly.
First eval finish: full_iqn_bc ~17.5 min (slower than bc_pretrained 5.1 min, similar to bc_ah 15.2 min).
Eval finish rate at 190 min: full_iqn_bc 56%, vis_pretrained 76%, bc_ah 67%, baseline 59%.
Benefit from full pretrain: Faster wall-clock to result — full_iqn_bc reaches 24.50s in 192 min (run ended), while vis_pretrained and bc_ah need 244–275 min. For the same A01 time, full_iqn_bc is ~25% faster in wall-clock. Final best time is tied with vis_pretrained and slightly worse than bc_ah (24.50s vs 24.47s).
Conclusion: Full IQN pretrain (v3_multi_offset) gives comparable A01 performance to vis_pretrained and faster time-to-result. No overfitting. bc_ah remains best for final time (24.47s); full_iqn_bc is a good option when you want fast wall-clock convergence with similar final performance. The high initial loss recovers within ~15 min.
Reproduce: python scripts/analyze_experiment_by_relative_time.py A01_as20_long A01_as20_long_vis_pretrained A01_as20_long_vis_bc_pretrained A01_as20_long_vis_bc_ah_pretrained A01_as20_long_full_iqn_bc --interval 5 --step_interval 50000
Runs full_iqn_bc_2 and full_iqn_bc_3 (separate runs)
A01_as20_long_full_iqn_bc, A01_as20_long_full_iqn_bc_2, and A01_as20_long_full_iqn_bc_3 are three separate runs (same config, run_name overridden to base, _2, _3). Each has its own save/ dir and its own TensorBoard log dir(s); within each run, tensorboard_suffix_schedule may split logs into _2, _3, … by step. Below we do not consider the first run (already documented); we analyze run _2 and run _3 in full.
Run A01_as20_long_full_iqn_bc_2 (~4.1 h cumulative training over ~1018 min TB wall span, 2 dirs — ~4× inflation)
Best A01: 24.510s early in training; then flat (no further best-time improvement).
Eval collapse (wall-clock axis): Mean ~25.29s, rate ~68% from ~50 min wall until ~770 min wall. At ~770 min wall (~**3.1 h** cumulative training if scaled linearly — use
cumul_training_hoursin TensorBoard for exact alignment) a collapse: mean jumps, rate drops, loss/Q spike. The “770 min” figure is not “770 minutes of training.”By steps: Best 24.51s by ~8M steps — well before the wall-time collapse.
Conclusion (run _2): Instability coincides with suffix log / process boundary; interpret long-horizon behavior on steps or cumul_training_hours, not raw wall minutes.
Run A01_as20_long_full_iqn_bc_3 (~19.5 h training, ~1162 min wall, ratio ~1)
Best A01 (wall-minute narrative preserved): Same progression as before: large gains early, ~20 ms improvement from ~410 min wall to ~910 min wall in the long tail.
By steps: Dominant gains in the first ~15M steps; then plateau — unchanged conclusion.
Loss: No collapse like _2.
Why run _3 showed almost no improvement over long time
Plateau at 24.50s by ~20M steps; long tail adds ~20 ms best time — still valid on step axis.
LR schedule argument unchanged.
No collapse in _3 — unchanged.
Recommendations. (1) Early-stop on step or cumul_training_hours stability. (2) Run _2: treat collapse as wall ~770 min / ~3 h training region — investigate restart/suffix boundary. (3) Run _3: 24.48s ceiling conclusion unchanged.
Reproduce:
Run _2:
python scripts/analyze_experiment_by_relative_time.py A01_as20_long_full_iqn_bc_2 --logdir tensorboard --interval 10 --step_interval 2000000Run _3:
python scripts/analyze_experiment_by_relative_time.py A01_as20_long_full_iqn_bc_3 --logdir tensorboard --interval 10 --step_interval 5000000
Experiment: Full IQN from BC with human best reference line (best_ref)
Goal: Test RL with the same full IQN pretrain (v3_multi_offset) but with the reference line taken from the best human-driven run on A01. The reference line (A01_0.5m_cl_best.npy) is set in map_cycle so that the environment uses the trajectory/path from the human best run (e.g. for checkpoints or track representation). Hypothesis: aligning the task with the human reference may improve learning or final time.
Setup: Same as full_iqn_bc (pretrain_bc_heads_path: "output/ptretrain/bc/v3_multi_offset"). Only difference: map_cycle.entries use reference_line_path: "A01_0.5m_cl_best.npy" for the A01 map (reference line from best human run). Run name: A01_as20_long_full_iqn_bc_3_best_ref.
Run duration: ~265 min (2 TensorBoard log dirs merged).
Results (by relative time)
Best A01 time: 24.57s at 250–260 min (alltime_min_ms; eval best 24.57s at 260 min). First eval finish at 62.6 min (much later than full_iqn_bc_3, which had first finish ~24 min).
Eval finish rate: 36% at 260 min (vs full_iqn_bc_3 ~69% at 1160 min; at similar wall time ~260 min, full_iqn_bc_3 had ~51% and best 24.58s).
Eval mean time (trained_A01): 201s at 260 min; improves from 294s (70 min) to 201s (260 min).
By steps: At 4M steps best 25.25s, rate 10%; at 8M steps best 24.70s, rate 31%.
Training loss: High at start (~16k), recovers to ~68 by 260 min. GPU learner % ~72–73%.
Comparison with full_iqn_bc_3 (no reference line): At ~260 min, best_ref reaches 24.57s and 36% finish rate. full_iqn_bc_3 at ~260 min had best 24.58s and ~51% rate. So best_ref is slightly better on best time (24.57s vs 24.58s) at similar wall time but lower finish rate (36% vs 51%) and later first finish (62.6 min vs ~24 min). The reference line does not clearly improve final performance in this run; the slower first finish suggests the different map/ref setup may change early exploration.
Conclusions
Reference line (human best) in map_cycle yields similar best time (24.57s) to full_iqn_bc_3 at 260 min (24.58s) but lower eval finish rate and later first eval finish. Run was shorter (265 min); longer run would be needed to see if best_ref can match or beat 24.48s.
Recommendation: If using the human best reference line, consider longer runs and compare finish rate and mean time; monitor whether first finish delay is due to env setup or exploration.
Reproduce: python scripts/analyze_experiment_by_relative_time.py A01_as20_long_full_iqn_bc_3_best_ref --logdir tensorboard --interval 10 --step_interval 2000000
Experiment: Full IQN from BC with 4 exploration episodes (4explo)
Goal: Test full IQN from BC (v3_multi_offset) with 4 exploration episodes per cycle instead of 64. In map_cycle, the exploration entry uses repeat: 4 so that each time the collector switches to the exploration map, it runs only 4 episodes before switching back (vs 64 in the default setup). Hypothesis: fewer exploration episodes per block may change the exploration/exploitation balance or data mix and affect convergence or final time.
Setup: Same as full_iqn_bc (pretrain_bc_heads_path: "output/ptretrain/bc/v3_multi_offset"). Only difference: map_cycle has the exploration entry with repeat: 4 (e.g. is_exploration: true, fill_buffer: true, repeat: 4) instead of repeat: 64. Run name: A01_as20_long_full_iqn_bc_3_4explo.
Run duration: ~337 min (2 TensorBoard log dirs merged).
Results (by relative time)
Best A01 time: 24.53s at 310–330 min (alltime_min_ms; eval best 24.53s at 330 min). First eval finish at 18.1 min.
Eval finish rate: 63% at 330 min. Eval mean time improves from ~298s (20 min) to ~128s (330 min).
By steps: At 2M steps best 24.96s, rate 10%; at 12M steps best 24.54s, rate 61%.
Training loss: High at start (~10k), recovers to ~62 by 330 min. GPU learner % ~69–70%.
Comparison with full_iqn_bc_3 (repeat 64): full_iqn_bc_3 at ~330 min had best 24.50s and eval rate ~57%; at 12M steps best 24.51s. So 4explo reaches 24.53s at 330 min and 24.54s at 12M steps — slightly worse than full_iqn_bc_3 (24.50s at similar time/steps) but in the same ballpark. First eval finish is earlier in 4explo (18.1 min vs ~24 min in _3). Eval finish rate at 330 min: 4explo 63% vs full_iqn_bc_3 ~57% at 260 min (different run lengths). So reducing exploration repeat from 64 to 4 does not improve best time and may slightly hurt it; finish rate is similar or slightly better in 4explo.
Conclusions
4 exploration episodes per cycle (repeat: 4) yields best 24.53s in ~337 min — comparable to but slightly worse than full_iqn_bc_3 with repeat 64 (24.50s at similar wall time). No clear benefit from fewer exploration episodes in this run.
Recommendation: Keep default exploration repeat (64) for full_iqn_bc unless further ablation shows a benefit from 4.
Reproduce: python scripts/analyze_experiment_by_relative_time.py A01_as20_long_full_iqn_bc_3_4explo --logdir tensorboard --interval 10 --step_interval 2000000
Configuration Changes
RL training (encoder and optional A_head source):
# Baseline
pretrain_encoder_path: null
# Vis pretrained
pretrain_encoder_path: "output/ptretrain/vis/v1/encoder.pt"
# BC pretrained (vis -> BC -> RL, encoder only)
pretrain_encoder_path: "output/ptretrain/bc/v1.1/encoder.pt"
# BC + A_head (encoder and action head from v2_multi_offset_ahead_dropout_inner)
pretrain_encoder_path: "output/ptretrain/bc/v2_multi_offset_ahead_dropout_inner/encoder.pt"
pretrain_actions_head_path: "output/ptretrain/bc/v2_multi_offset_ahead_dropout_inner/actions_head.pt"
# BC + A_head with encoder freeze (enc_freeze run; only difference: freeze img_head during RL)
# pretrain_encoder_path and pretrain_actions_head_path same as above
nn:
vis:
freeze: true
# BC + A_head with encoder AND A_head freeze (enc_ah_freeze run)
nn:
vis:
freeze: true
decoder:
advantage:
freeze: true
# enc_ah_freeze_resume: unfreeze and use lower lr/epsilon
nn:
vis:
freeze: false
decoder:
advantage:
freeze: false
lr_schedule: [[0, 0.00005], [500000, 0.0001], [3000000, 0.00005], ...]
# epsilon_schedule: [[0, 0.1], [50000, 0.1], [300000, 0.5], [3000000, 0.03]]
# Full IQN from BC (full_iqn_bc run)
pretrain_bc_heads_path: "output/ptretrain/bc/v3_multi_offset"
# Full IQN from BC with human best reference line (best_ref run)
# Same as above; in addition, map_cycle uses reference_line_path from best human run:
# map_cycle.entries: reference_line_path: "A01_0.5m_cl_best.npy" for A01 map.
# Full IQN from BC with 4 exploration episodes (4explo run): map_cycle exploration entry repeat: 4 instead of 64.
Visual pretrain (config_files/pretrain/vis/pretrain_config.yaml): task ae, image_size 64, n_stack 1, epochs 50, batch_size 4096, output_dir output/ptretrain/vis, run_name v1.
BC pretrain (config_files/pretrain/bc/pretrain_config_bc.yaml):
encoder_init_path: "output/ptretrain/vis/v1/encoder.pt"
bc_mode: backbone
n_actions: 12
image_size: 64
n_stack: 1
epochs: 50
batch_size: 4096
output_dir: output/ptretrain/bc
run_name: v1.1
Hardware
GPU: Same as other A01 runs.
Parallel instances: Same gpu_collectors_count (from config_default).
System: Windows.
Conclusions
Does BC help in the current variant? No for encoder-only BC: vis_pretrained still achieves the best A01 time (24.47s) and highest eval finish rate (73%) by 260 min among the first three runs.
BC + A_head (bc_ah) matches the best. The run A01_as20_long_vis_bc_ah_pretrained (encoder + A_head from v2_multi_offset_ahead_dropout_inner) reaches 24.47s at 240 min — tied with vis_pretrained and better than encoder-only bc_pretrained (24.49s) and baseline (24.53s). So the new experiment is as good as the previous best (vis-only) on final A01 time. bc_ah has slower first eval finish (15.2 min vs 5.1–11.2 min) and lower finish rate at 240 min (68% vs 74% vis); it is a viable alternative when using the multi-offset A_head pretrain.
BC advantage (encoder-only): Only in the very early phase: earliest first finish (5.1 min), good initial time (24.92s by 10 min). So BC gives a faster “cold start” but vis-only catches up and slightly outperforms by 260 min.
Encoder freeze (bc_ah vs enc_freeze): Over the common window (158 min), bc_ah (encoder trainable) has better best A01 time (24.50s vs 24.55s at 155 min) and lower training loss; enc_freeze has much earlier first eval finish (4.1 min vs 15.2 min). So freezing the encoder keeps a strong policy prior for fast first finish but does not match the trainable-encoder run on final best time within the same wall-clock. For long runs aiming at best A01 time, keep encoder trainable (bc_ah); use enc_freeze if you need fastest early first finish or fewer trainable parameters.
Encoder + A_head freeze (enc_ah_freeze): Freezing both encoder and A_head severely hurts RL: best time 24.97s (~470 ms worse than bc_ah), finish rate 22%, loss ~5x higher. The frozen A_head blocks policy adaptation. Do not freeze A_head; freeze encoder only if you prioritize early first finish.
Resume from enc_ah_freeze (enc_ah_freeze_resume): Unfreezing everything and using lower lr (5e-5 at start, 1e-4 from 500k) and lower epsilon (0.1 vs 1.0) recovers: best time 24.51s (vs 24.97s), finish rate 56% (vs 22%), loss ~73 (vs ~230). The pretrain prior is useful when allowed to fine-tune gently.
Full IQN from BC (full_iqn_bc): Loading the entire IQN from v3_multi_offset (
pretrain_bc_heads_path) gives 24.50s at 190 min — tied with vis_pretrained, slightly worse than bc_ah (24.47s). No overfitting. Main benefit: faster wall-clock — reaches 24.50s in 192 min vs 244–275 min for other pretrained runs. High initial loss (BC classification vs RL) recovers by ~15 min.Run full_iqn_bc_2 (~1020 min, separate run): Best 24.51s early; at ~770 min a collapse (loss/Q spike, eval rate 68% → 29%), then partial recovery. Best unchanged. Coincides with second TB log dir; investigate instability cause.
Run full_iqn_bc_3 (~1166 min, separate run): Best improves to 24.50s by ~410 min, then only 24.49s by 650 min and 24.48s by 910 min (~20 ms over ~500 min). Why almost no improvement: plateau at 24.50s + low LR (5e-5, 1e-5) in long tail; no collapse. Recommendation: Early stop after ~400–500 min; treat 24.48s as ceiling for this schedule.
Run best_ref (~265 min): Full IQN from BC with reference line from best human-driven run (
A01_0.5m_cl_best.npyin map_cycle). Best 24.57s at 260 min; eval finish rate 36%; first eval finish 62.6 min. At similar wall time, similar best time to full_iqn_bc_3 (24.58s) but lower finish rate and later first finish. Reference line does not clearly improve final performance in this run.Run 4explo (~337 min): Full IQN from BC with exploration repeat 4 (map_cycle exploration entry
repeat: 4instead of 64). Best 24.53s at 330 min; eval finish rate 63%; first eval finish 18.1 min. Slightly worse best time than full_iqn_bc_3 (24.50s at similar time); no clear benefit from fewer exploration episodes.
Recommendations
For best final A01 performance (current experiments): Use visual pretrain only (
pretrain_encoder_path: "output/ptretrain/vis/v1/encoder.pt") or BC + A_head (bc_ah) — both reach 24.47s. Do not add the encoder-only BC stage (v1.1) if the goal is best final time; bc_ah matches vis and is better than encoder-only BC.If you need fastest early convergence (e.g. for debugging): BC pretrain (v1.1) gives the earliest first finish (5.1 min) and a good initial time in the first 10–20 min; then consider switching to vis-only or bc_ah for long runs.
BC + A_head (bc_ah): Use
pretrain_encoder_pathandpretrain_actions_head_pathfrom v2_multi_offset_ahead_dropout_inner; reaches 24.47s (tied with vis-only). To freeze encoder:nn.vis.freeze: true(enc_freeze); do not freeze A_head (nn.decoder.advantage.freeze) — enc_ah_freeze performs poorly. If you have an enc_ah_freeze checkpoint, resume with unfreeze + lower lr/epsilon (enc_ah_freeze_resume) to recover to ~24.51s.
Suggested RL variations to better understand pretrain contribution:
Lower LR for pretrained parts: Use a separate
param_groupwith 0.1x or 0.01x LR for pretrained layers (encoder, A_head) vs random-initialized (float_feature_extractor, iqn_fc, V_head). Tests whether “gentle” fine-tuning of pretrain preserves or improves results.Warmup with frozen pretrain: Start RL with encoder (and optionally A_head) frozen for N steps (e.g. 50k–200k), then unfreeze. Compare with bc_ah and enc_freeze; tests if early stabilization helps.
Full IQN pretrain (full_iqn_bc): Use
pretrain_bc_heads_path: "output/ptretrain/bc/v3_multi_offset"for fast wall-clock convergence (24.50s in ~192 min); final time tied with vis_pretrained, slightly worse than bc_ah (24.47s). No overfitting.Pretrain ablation: Run RL from random init (baseline), encoder only (vis v2), A_head only (random encoder + BC A_head — would require loading only A_head), and both (bc_ah). Quantifies contribution of encoder vs A_head vs synergy.
Shorter runs with matched steps: Run all variants for exactly the same number of gradient steps (e.g. 5M) to compare sample efficiency without wall-clock bias.
Different exploration schedules: With pretrain, the policy is already reasonable; try faster epsilon decay (e.g. 0.1 by 100k instead of 3M) to reduce random actions and see if it helps or hurts.
Next experiments to improve final time
Current best A01 time is 24.47s (bc_ah, vis_pretrained). full_iqn_bc and long runs plateau at 24.48–24.50s; the main bottleneck in long runs is the LR schedule (5e-5 → 1e-5 leaves almost no room to improve). Below are prioritized experiments to try to go below 24.47s.
1. Gentler LR decay (full_iqn_bc or bc_ah) — highest priority
Idea: Keep a higher LR in the plateau phase so the policy can still update. Current schedule drops to 1e-5 at 30M steps; after that, run _3 gained only ~20 ms in 15M steps.
Change: e.g. keep 5e-5 until 50M steps, then 2e-5 (instead of 1e-5 at 30M). Or: 1e-3 (0–10M), 5e-5 (10M–40M), 2e-5 (40M+).
Run: Same setup as full_iqn_bc (or bc_ah); only
lr_schedulein config differs. Compare by relative time and by steps to current best runs.Success: Best time below 24.47s or clear gain (e.g. 24.45s) at similar wall-clock.
2. LR “plateau breaker” (full_iqn_bc)
Idea: When best time has not improved for N minutes (e.g. 60–90), bump LR slightly (e.g. from 5e-5 to 1e-4) for a short phase, then decay again. Requires code change (callback or schedule that depends on eval metric).
Rationale: Run _3 plateaued at 24.50s from ~410 min; a short higher-LR phase might escape the local optimum.
3. bc_ah + longer training with gentler LR
Idea: bc_ah already reaches 24.47s (best so far) but runs were ~244 min. Run bc_ah with the gentler LR from (1) and train longer (e.g. 500–600 min) with early stopping.
Goal: See if 24.47s is a ceiling for bc_ah or if more steps + higher LR in the tail push below (e.g. 24.45s).
4. Full IQN from BC (v3_multi_offset) + gentler LR
Idea: full_iqn_bc converges fast but plateaus at 24.48–24.50s. Same pretrain, but use the gentler
lr_schedulefrom (1) and run at least 400–500 min.Goal: Check if full_iqn_bc can match or beat 24.47s when the LR does not kill updates in the long tail.
5. Lower LR for pretrained parts (bc_ah or full_iqn_bc)
Idea: Use a smaller LR (e.g. 0.1x) for pretrained layers (encoder, A_head or full IQN body) and normal LR for the rest. Reduces “forgetting” and may allow finer tuning at the end.
Requires: Code change (param_groups in optimizer). Already listed in “Suggested RL variations” above.
6. Exploration schedule
Idea: Try slower epsilon decay (e.g. 0.1 by 5M steps instead of 3M) so the policy explores more in the plateau phase; or try slightly higher
epsilon_boltzmann_scheduleso evaluation is less greedy.Risk: Can increase variance or slow convergence; compare by relative time and steps.
7. Resume from best checkpoint + fine-tune
Idea: Take the best checkpoint from full_iqn_bc_3 (e.g. when best was 24.50s around 400 min) or bc_ah (24.47s), resume training with a fixed small LR (e.g. 2e-5 or 5e-5) for 200–300 min.
Goal: “Fine-tuning” phase without the early high-LR phase; may refine the policy without destabilizing.
Suggested order: Do (1) gentler LR first (config-only, no code change). If (1) gives a clear gain, then try (3) bc_ah + gentler LR and (4) full_iqn_bc + gentler LR for a direct comparison. Then (5) and (2) if you can change the code; (6) and (7) as follow-ups.
Analysis Tools:
By relative time and by steps (three runs):
python scripts/analyze_experiment_by_relative_time.py A01_as20_long A01_as20_long_vis_pretrained A01_as20_long_vis_bc_pretrained --interval 5 --step_interval 50000By relative time and by steps (four runs, include bc_ah):
python scripts/analyze_experiment_by_relative_time.py A01_as20_long A01_as20_long_vis_pretrained A01_as20_long_vis_bc_pretrained A01_as20_long_vis_bc_ah_pretrained --interval 5 --step_interval 50000bc_ah vs enc_freeze (two runs):
python scripts/analyze_experiment_by_relative_time.py A01_as20_long_vis_bc_ah_pretrained A01_as20_long_vis_bc_ah_pretrained_enc_freeze --interval 5 --step_interval 50000bc_ah vs enc_freeze vs enc_ah_freeze (three runs):
python scripts/analyze_experiment_by_relative_time.py A01_as20_long_vis_bc_ah_pretrained A01_as20_long_vis_bc_ah_pretrained_enc_freeze A01_as20_long_vis_bc_ah_pretrained_enc_ah_freeze --interval 5 --step_interval 50000enc_ah_freeze vs enc_ah_freeze_resume:
python scripts/analyze_experiment_by_relative_time.py A01_as20_long_vis_bc_ah_pretrained_enc_ah_freeze A01_as20_long_vis_bc_ah_pretrained_enc_ah_freeze_resume --interval 5 --step_interval 50000Full IQN from BC (five runs):
python scripts/analyze_experiment_by_relative_time.py A01_as20_long A01_as20_long_vis_pretrained A01_as20_long_vis_bc_pretrained A01_as20_long_vis_bc_ah_pretrained A01_as20_long_full_iqn_bc --interval 5 --step_interval 50000Run full_iqn_bc_2:
python scripts/analyze_experiment_by_relative_time.py A01_as20_long_full_iqn_bc_2 --logdir tensorboard --interval 10 --step_interval 2000000Run full_iqn_bc_3:
python scripts/analyze_experiment_by_relative_time.py A01_as20_long_full_iqn_bc_3 --logdir tensorboard --interval 10 --step_interval 5000000Run best_ref (human reference line):
python scripts/analyze_experiment_by_relative_time.py A01_as20_long_full_iqn_bc_3_best_ref --logdir tensorboard --interval 10 --step_interval 2000000Run 4explo (exploration repeat 4):
python scripts/analyze_experiment_by_relative_time.py A01_as20_long_full_iqn_bc_3_4explo --logdir tensorboard --interval 10 --step_interval 2000000Plots:
python scripts/generate_experiment_plots.py --experiments pretrain_bc pretrain_bc_full_iqn pretrain_bc_enc_freeze pretrain_bc_enc_ah_freeze pretrain_bc_enc_ah_freeze_resume(generates comparison plots when tensorboard logs exist)